
|
I am a PhD student in the Robotics Institute at Carnegie Mellon University advised by Professor Chris Atkeson. Prior to CMU, I was at Georgia Tech where I received my B.S. in Computer Engineering. I'm interested in robot learning and confronting the challenges of applying learning methods to real-world systems. The focus of my current research is enabling robots to learn about and interact with physical processes in the real world. A general theme in my work is leveraging decomposition and abstraction, either in both time and space, to make planning and learning more efficient. Email / CV / Google Scholar / Github |
|
|
|
Learning Temporally Decomposed Dynamics to Facilitate Planning through Complex Physical Interactions
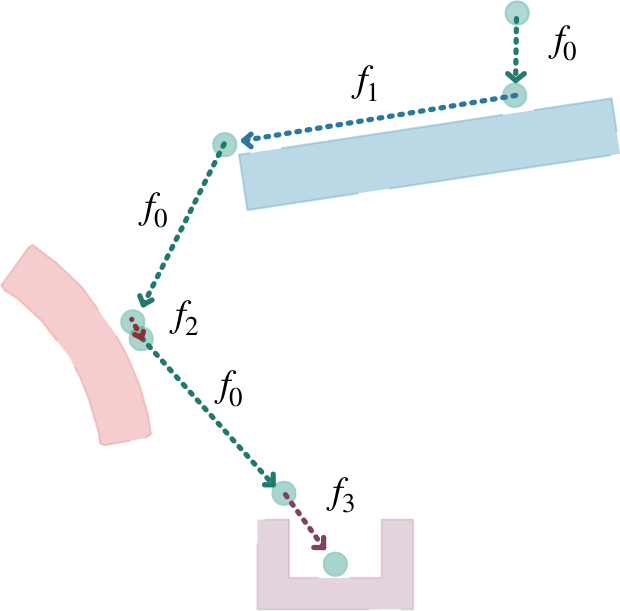
Consider a marble run task where a robot must configure objects in the scene so the ball reaches a specified goal state. Because actions can only be taken at the beginning of the tasks, reasoning about the correct placement of the objects requires imagining the outcome of complex interactions that unfold over an extended period of time. Learning a single-step dynamics model that can accurately make predictions over an entire trajectory is difficult due to the highly discontinuous dynamics and error propagation that results from sequencing predictions over 100's of steps. I hypothesize that learning temporally decomposed models of the dynamics will mitigate many of these challenges and facilitate planning. Decomposition should allow for more accurate prediction of highly discontinuous dynamics by modeling the trajectories as a piecewise system. I am formulating each primitive model as a multi-step model that directly predicts the output of an interaction and ignores all of the intermediate states throughout the interaction. For example, a ball colliding with a straight slanted edge may bounce a few times before rolling off. Humans generally wouldn't keep track of how many times the ball bounces before beginning to roll, but are mostly focused on the velocity as it rolls off the edge. This design decision greatly reduces the amount of steps in the trajectory and helps avoid the vanishing gradient issue that occurs when back propagating the gradient through longer trajectories for planning. It also provides an explicit way to reason about bifurcations in the trajectory that would be difficult with a single dynamics model. On the real system, we find that bifurcations occur frequently due to the stochasticity of the real world. Additionally, I am leveraging graph neural networks to encode the relationship between the ball and edges in the scene for the primitive dynamics models. |
|
|
 |
Alisa Allaire, Christopher Atkeson International Conference on Robotics and Automation (ICRA), 2023 project page / paper Tasks involving complex dynamic interactions remain challenging in robotics, because small variations in the environment can have a significant impact on task outcomes. For such tasks, learning a single deterministic policy that performs well across a variety of tasks and uncertain dynamics is difficult, so we focus on structuring exploration with multiple stochastic policies based on a mixture of experts (MoE) policy representation that can be efficiently adapted in the real world. The MoE policy is composed of stochastic sub-policies that allow exploration of multiple distinct regions of the action space (or strategies) and a high-level selection policy to guide exploration towards the most promising regions. We develop a robot system to evaluate our approach in a real-world physical problem solving domain. After training the MoE policy in simulation, online learning in the real world demonstrates efficient adaptation within just a few dozen attempts. Our results confirm that representing multiple strategies promotes efficient adaptation in new environments and strategies learned under different dynamics can still provide useful information about where to look for solutions. |
|
Cornelia Bauer*, Dominik Bauer*, Alisa Allaire , Christopher Atkeson, Nancy Pollard International Conference on Robotics and Automation (ICRA), 2022 paper In this work, we investigate a form of dynamic contact-rich locomotion in which a robot pushes off from obstacles in order to move through its environment. We present a reflex-based approach that switches between optimized hand-crafted reflex controllers and produces smooth and predictable motions. In contrast to previous work, our approach does not rely on periodic movements, complex models of robot and contact dynamics, or extensive hand tuning. We demonstrate the effectiveness of our approach and evaluate its performance compared to a standard model-free RL algorithm. We identify continuous clusters of similar behaviours, which allows us to successfully transfer different push-off motions directly from simulation to a physical robot without further retraining. |
|
|